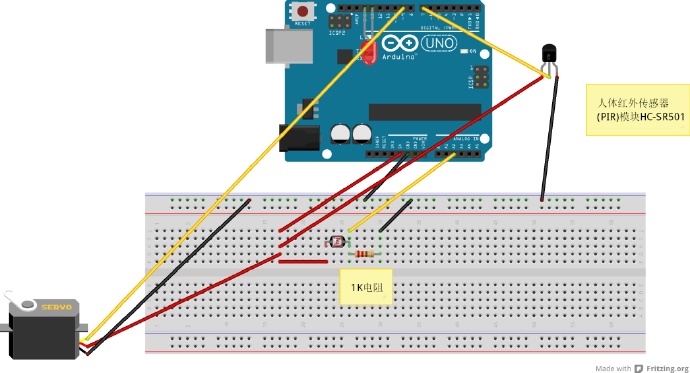
使用 Arduino 光敏、人体红外传感器、舵机来控制灯光开启。这里以不破坏原则使用舵机推动开关来实现开灯和关灯。 实现目标:区域内光线强度不够时,同时有人在区域内驱动舵机推动开关开灯,无人在或光线强度足够则关灯
接线图
控制代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
| #include <Servo.h>
Servo myservo;
int brightPin = 2;
int brightVal = 0;
int minLight = 250;
int ledPin = 13;
int infraredPin = 7;
int personState = LOW;
int lightState = LOW;
int switchPin = 9;
int openLight = HIGH;
int closeLight = LOW;
unsigned long delayMillis = 2000;
unsigned long lastMillis = 0;
int lightOpen = 70;
int lightClose = 180;
void setup() {
pinMode(ledPin, OUTPUT);
pinMode(infraredPin, INPUT);
myservo.attach(switchPin);
Serial.begin(9600);
myservo.write(90);
}
void loop() {
int nowState = myservo.read();
Serial.print("nowState -> ");
Serial.println(nowState);
if (lightOpen == nowState){
Serial.print("open with high state\n\n");
lightState = HIGH;
}
if (lightClose == nowState){
Serial.print("open with low state\n\n");
lightState = LOW;
}
int brightState = detectiveBright();
int personState = detectivePerson();
if (personState){
lastMillis = millis();
}
if (false == brightState){
lightState = LOW;
if (personState && LOW == lightState){
switchLight(openLight);
lastMillis = millis();
Serial.print("first start the light,the lastmillis is:");
Serial.println(lastMillis);
}else if (false == personState && HIGH == lightState){
Serial.print(" turn off:");
Serial.println(brightState);
switchLight(closeLight);
}
}else{
lightState = HIGH;
if (HIGH == lightState && false == personState){
unsigned long currentMillis = millis();
if ((currentMillis - lastMillis) > delayMillis){
Serial.print(" turn off:");
Serial.println(lastMillis);
switchLight(closeLight);
lastMillis = 0;
}else{
unsigned long check = currentMillis - lastMillis;
Serial.print("still have time to turn off:");
Serial.println(check);
}
}
}
delay(100);
}
bool detectiveBright() {
brightVal = analogRead(brightPin);
if (brightVal < minLight){
return false;
}else{
return true;
}
}
bool detectivePerson() {
int detectiveNum = 0;
for (int i = 0; i < 20; i++){
personState = digitalRead(infraredPin);
if (HIGH == personState){
detectiveNum++;
delay(5);
}
}
Serial.print("detectivePerson -> detectiveNum: ");
Serial.println(detectiveNum);
if (detectiveNum >= 10){
Serial.print("perple on\n");
return true;
}else{
Serial.print("perple off\n");
return false;
}
}
void switchLight(int state) {
int nowState = myservo.read();
if (state == openLight && lightOpen != nowState){
Serial.print("open");
myservo.write(lightOpen);
}
if (state == closeLight && lightClose != nowState) {
Serial.print("close");
myservo.write(lightClose);
}
lightState = state;
digitalWrite(ledPin, lightState);
Serial.print("switchLight(): ");
Serial.println(lightState);
}
|
13号口LED灯仅调试时使用,测试时需拿下LED灯,LED亮会影响光敏判断流程 舵机最好单独供电,人体红外探测范围约160度左右不够时可多加几位人体红外,面板包仅测试时使用,长期使用可能会不稳定